The ImFusion Suite provides a powerful toolbox for working with point clouds and meshes and combining them with volumetric data such as CT scans. The toolbox includes functions for fast alignment of point clouds and meshes. A particular emphasis is placed on algorithms dealing with structured point clouds originating from depth sensors. For this type of data very fast GPU-based alignment and processing algorithms such as normal computation and denoising are available.
Surface fitting to point clouds as well as extraction of point clouds from surfaces enable to seamlessly transition between these two common representations. There are also functions transforming surfaces to volumetric representations and vice versa. In addition, measuring and visualization tools for showing the distance between surfaces and point clouds, measuring the distance between points and placing arbitrary cuts through the data are available.
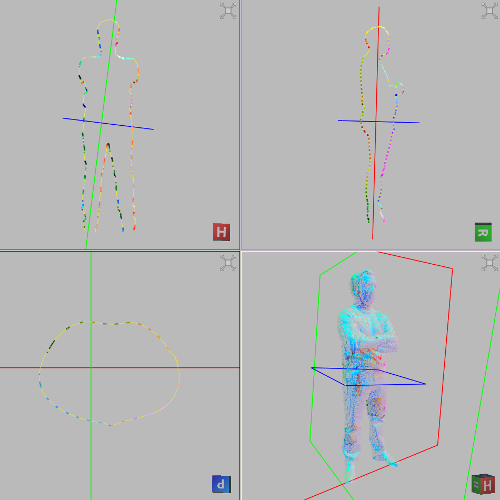
Arbitrary planar cuts can be placed through a mesh or point cloud. The cut will show all surfaces passing through it, in this case a point cloud and a mesh, allowing for instance to compare the differences between two scans.
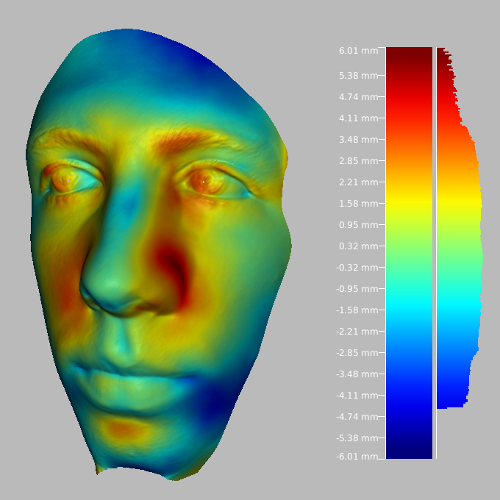
Both signed and unsigned surface distance can be computed between meshes and/or point clouds. The results are color coded on the surface and tools for controlling the colored range are available.