We provides a number of algorithms for endoscopic vision applications, ranging from basics such as camera calibration, hand-eye calibration and framegrabber integration to advanced topics such as SLAM and monocular depth estimation.
A particular focus is on run-time performance and efficient utilization of GPU resources.
State of the art machine learning models are available for tasks such as:
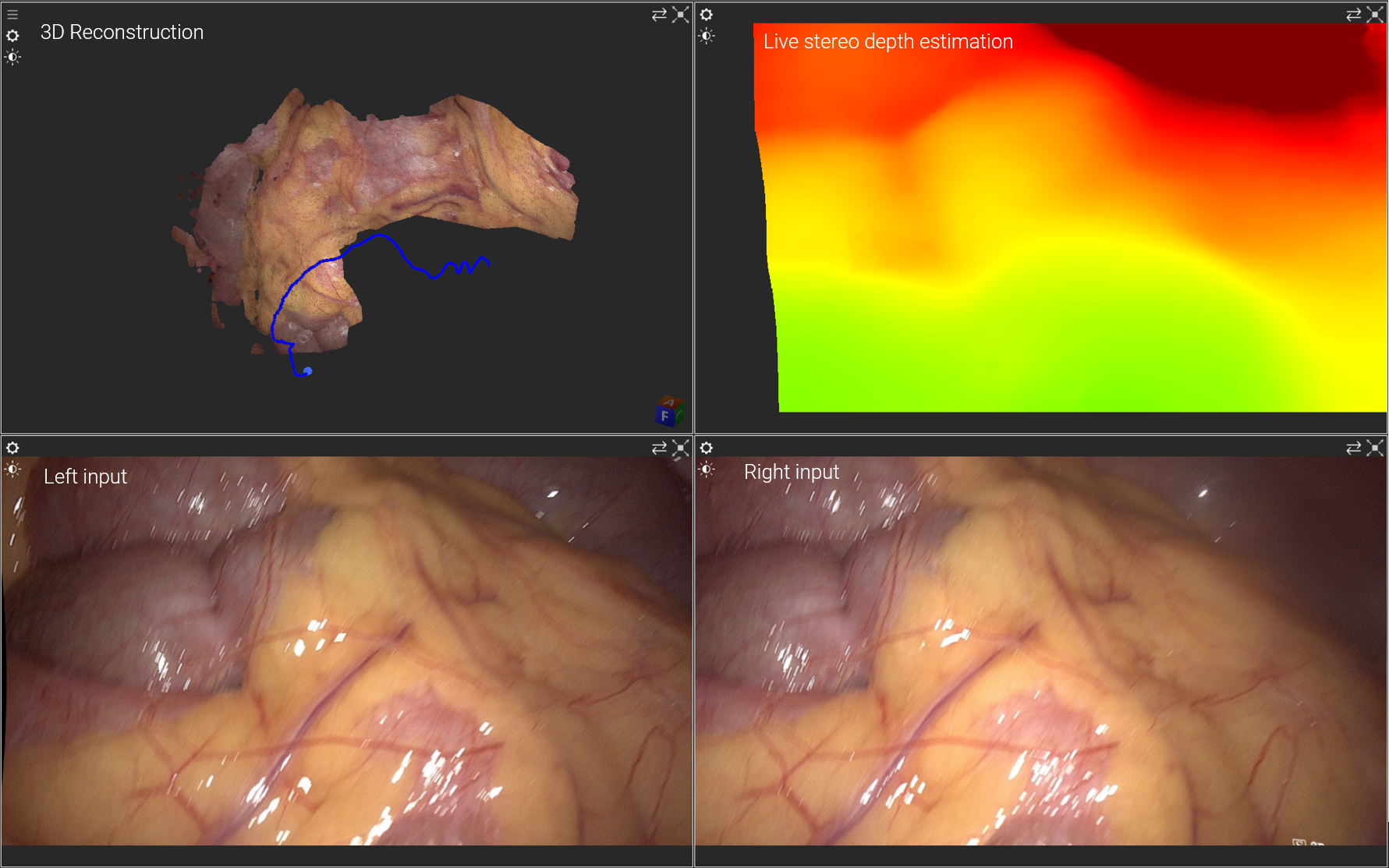
Endoscopic SLAM
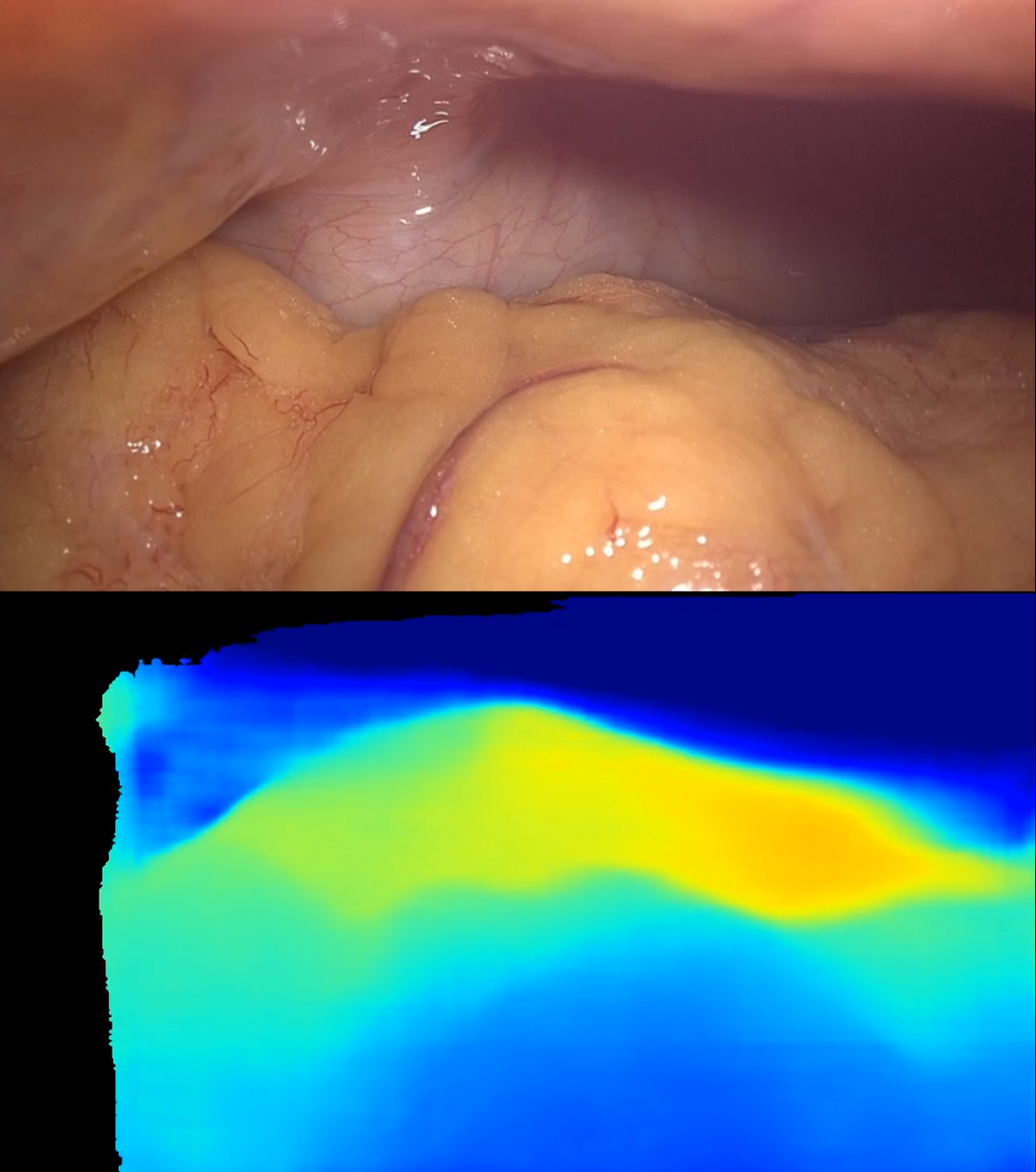
Monocular Depth Estimation