A robotics toolbox for advanced research and innovative products
The ImFusion Robotics and ROS plugins enable you to create bleeding-edge robotic applications - without trade-offs between
development speed, performance, and reliability.
Our modern, consistent APIs allow to quickly build complex workflows with low development and maintenance effort. Our high-quality software components implement state-of-the-art methods, providing a solid baseline and strong platform for scientific research. At the same time, they can be rapidly tailored and included into certified medical devices.
Our modern, consistent APIs allow to quickly build complex workflows with low development and maintenance effort. Our high-quality software components implement state-of-the-art methods, providing a solid baseline and strong platform for scientific research. At the same time, they can be rapidly tailored and included into certified medical devices.
The Robotics plugin provides a solid, comprehensive and customisable environment:
- Intuitive GUI and C++ API for motion planning and execution
- Native, ROS-free integration with Franka Emika and Universal Robots devices
- Fast integration of custom end effectors
- Simple handling of multi-robot scenarios
- Convenient framework for the integration of custom robots and control strategies
- Interactive hand-eye calibration utility
- Easy combination with the whole ImFusion portfolio for surgical navigation, freehand ultrasound, RGBD reconstruction, and more

The ROS plugin gives you the best of ROS, with added convenience:
- Fast installation: no previous ROS installation required
- ROS1/2 agnostic API: code once, run everywhere
- Windows support: double-click on our installer, and access all of ROS and MoveIt!
- Deep integration: connect ImFusion Streams to ROS topics and tf, import and export rosbags, start a ROS1 master, ...
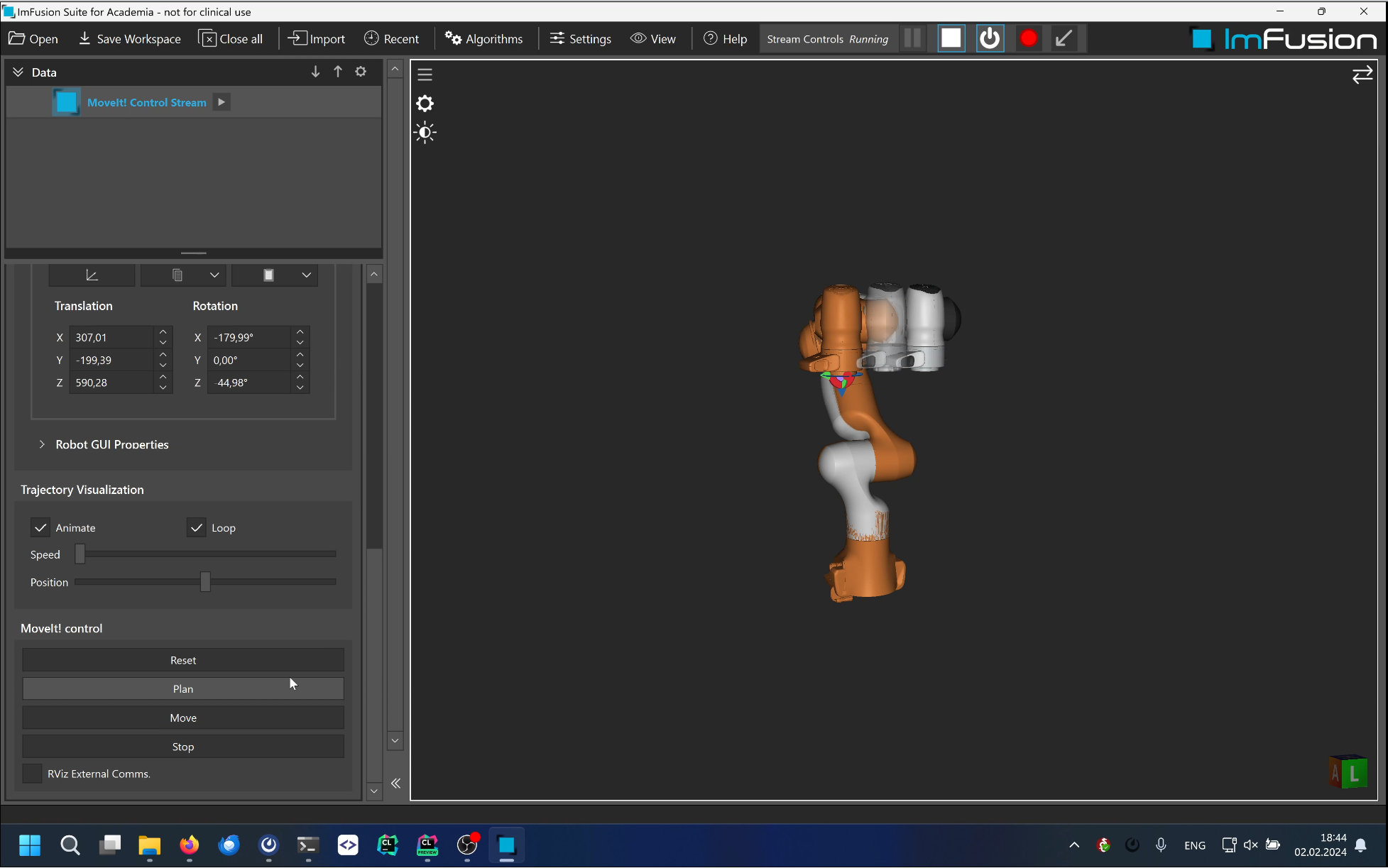
- MoveIt! connection: plan and execute motions for an external MoveIt! instance from the ImFusion GUI or C++ SDK

| OS | ROS1 Noetic | ROS2 Foxy | ROS2 Humble |
|---|---|---|---|
| Ubuntu 22.04 | ✓ | ||
| Ubuntu 20.04 | ✓ | ✓ | |
| Windows | ✓ | ✓ |