ImFusion’s robotics software framework provides robust building blocks for developing real-time medical and industrial robotic applications. With native support for sensor integration, image-based navigation, and interventional guidance, our platform helps you prototype, validate, and deploy robotic solutions faster.
Our framework provides dedicated tools to support advanced use cases such as robotic ultrasound scanning and surgical navigation. Sophisticated workflows can be implemented quickly leveraging further modules of the broad ImFusion SDK.
A single installer to access a vast portfolio of robot and sensor integrations, visualization and calibration tools, and state-of-the-art methods in domains such as AI, computer vision, and medical imaging. Reproducing a working setup or upgrading it are made painless.
Our APIs allow to access the full set of capabilities of robots and sensors while abstracting over differences between individual devices. At the same time, they harmonize with further frameworks such as ROS and NVidia Isaac by providing stable bindings.
This demo showcases how our framework makes robotic ultrasound work out of the box.
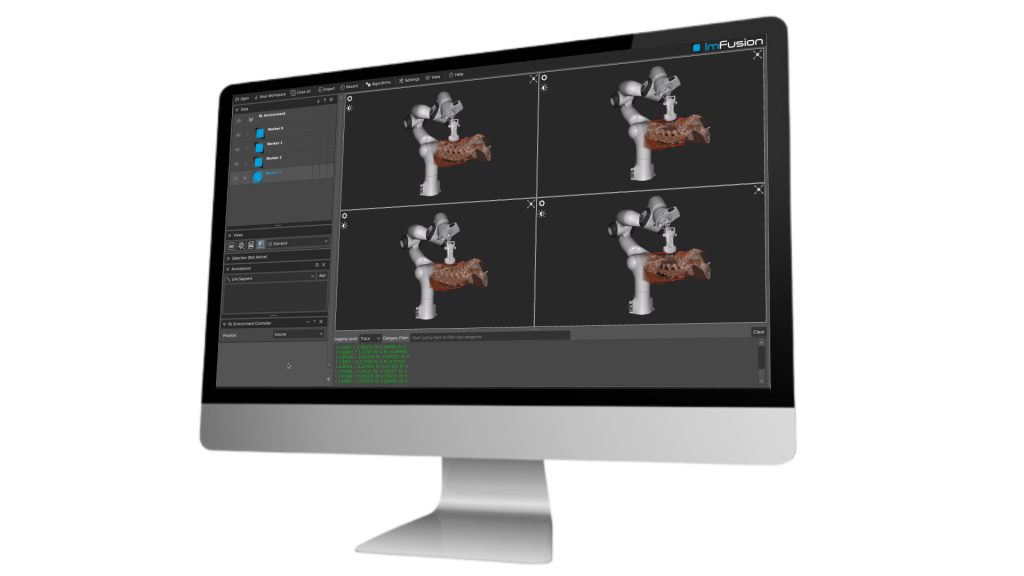
Intraoperative multimodal robotic imaging with the ImFusion SDK.
ImFusion Robotic Module provides a force controller compatible with any cobot, allowing you to keep contact and probe direction in challenging scenarios, while being absolutely safe. Even without cameras!
Robot & Sensor Integration
Robotic Ultrasound Toolbox
Robotic Calibration Tools
ROS integration
ROS1/2 abstraction
ROS-O support
ROSBag support
MoveIt integration
Our forum is already packed with some common answers, tips and tricks and support information from our own product experts. Have a look or submit a request to our team.